Տեղեկատվական 4D շաթլային փոխադրիչ համակարգ





շղթայական փոխադրիչ
| նախագիծ | Հիմնական տվյալներ | Նշում |
| մոդել | SX-LTJ-1.0T -600H | |
| Շարժիչի ռեդուկտոր | ԿԱՐԵԼ | |
| կառուցվածքի տեսակը | Շրջանակը պատրաստված է ալյումինե համաձուլվածքից, իսկ ոտքերը և ծալքերը պատրաստված են ածխածնային պողպատից | |
| վերահսկողության մեթոդ | Ձեռքով/առանձին/առցանց/ավտոմատ կառավարում | |
| անվտանգության միջոցառումներ | Էլեկտրական կողպեք, պաշտպանիչ ուղեցույցներ երկու կողմերում | |
| ընդունել ստանդարտը | ՋԲ/Թ7013-93 | |
| օգտակար բեռ | Առավելագույնը 1000 կգ | |
| բեռների ստուգում | Ֆոտոէլեկտրական սենսորներ | Հիվանդ/Հիվանդ+Ֆ |
| շղթայական ռելս | Ցածր շփման նեյլոնե ռելս | |
| փոխադրիչ շղթա | Donghua շղթա | |
| կրող | Ֆուկույամա ապարատային սարքավորումներ, կնքված գնդիկավոր կրողներ | |
| փոխանցման արագություն | 12 մ/րոպե | |
| Մակերեսային մշակում և ծածկույթ | Մարինացում, ֆոսֆատացում, ցողում | |
| աղմուկի կառավարում | ≤73դբ | |
| մակերեսային ծածկույթ | համակարգչային մոխրագույն | Կցված նմուշներ |
Սարքավորումների կառուցվածքը
Փոխակրիչը կազմված է շրջանակից, ելուստային մեխանիզմներից, շարժիչի միավորից և այլն: Շրջանակը պատրաստված է ալյումինե համաձուլվածքից, և երկու ծայրերն էլ ամրացված են անատամ շրջադարձային անիվներով: Փոխակրիչի շղթան ուղիղ երկշարք շղթա է՝ P=15.875 մմ քայլով: Շղթայի հենարանը պատրաստված է բարձր մոլեկուլային պոլիէթիլենից (UHMW)՝ ինքնաշաղախիչ ազդեցությամբ: Եռակցված ելուստային մեխանիզմները միացված են հիմնական շրջանակին պտուտակային ճնշման թիթեղի միջոցով, M20 պտուտակային կարգավորիչ ոտքերը միացված են գետնին, իսկ փոխադրող մակերեսի բարձրությունը կարող է կարգավորվել +25 մմ-ով: Շարժիչ սարքը կազմված է մեջտեղում ներկառուցված դանդաղեցման շարժիչից, շարժիչի լիսեռի հավաքածուից, փոխանցման ատամնանիվի հավաքածուից, շարժիչի նստատեղից և շղթայի լարման սարքից, իսկ պտուտակային տիպի կարգավորող լարման ճախարակը լարում է փոխադրող շղթան:
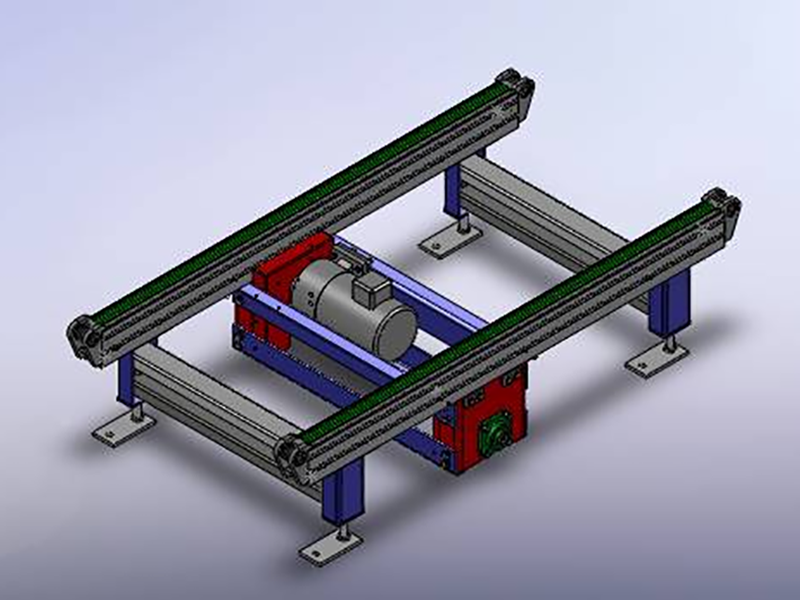
աշխատանքային սկզբունքը.
Շարժիչը շարժիչի լիսեռը շարժում է փոխանցման խմբի միջոցով, իսկ շարժիչի լիսեռը շարժում է փոխադրող շղթան՝ պալետի փոխադրման գործառույթն իրականացնելու համար։
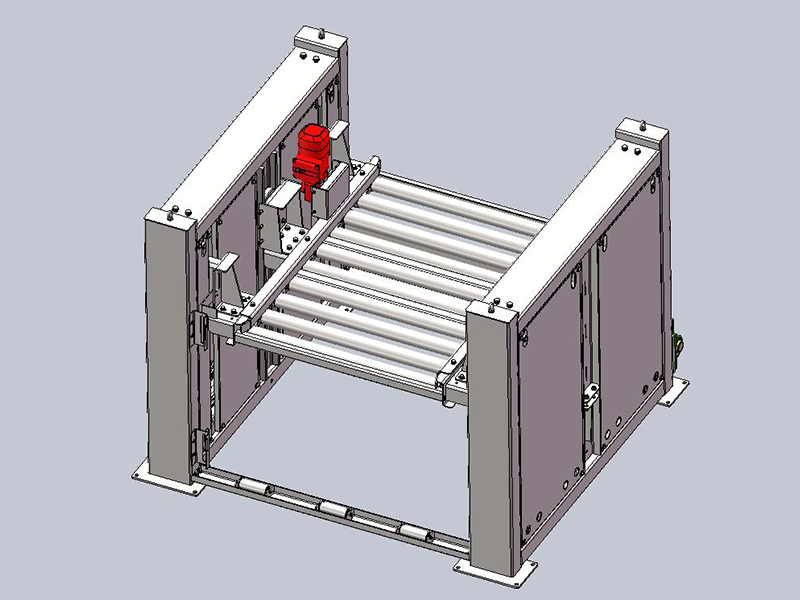
Գլանաձև փոխակրիչ
| Ապրանք | Հիմնական տվյալներ | Նշումներ |
| Մոդել | SX-GTJ-1.0T -600H | պողպատե կառուցվածք |
| Շարժիչի ռեդուկտոր | ԿԱՐԵԼ | |
| կառուցվածքի տեսակը | ածխածնային պողպատի ծռում | |
| վերահսկողության մեթոդ | Ձեռքով/առանձին/առցանց/ավտոմատ կառավարում | |
| օգտակար բեռ | Առավելագույնը 1000 կգ | |
| փոխանցման արագություն | 12 մ/րոպե | |
| գլան | 76 կրկնակի շղթայական գլան | |
| փոխանցման շղթա | Հուադոնգի շղթայի գործարան | |
| կրող | Հա առանցք | |
| Մակերեսային մշակում և ծածկույթ | Մարինացում, ֆոսֆատացում, ցողում | |
Սարքավորումների կառուցվածքը
Սարքավորումների կառուցվածքը՝ Գլանաձև սեղանի մեքենան բաղկացած է շրջանակից, ելուստներից, գլաններից, շարժիչներից և այլ հանգույցներից: Գլանաձև φ76x3 միակողմանի կրկնակի ատամնանիվով ցինկապատ գլան, գլանների միջև հեռավորությունը P=174.5 մմ է, միակողմանի կրկնակի ատամնանիվով: Եռակցված ելուստները միացված են հիմնական շրջանակին պտուտակային ճնշման թիթեղի միջոցով, M20 պտուտակային կարգավորիչ ոտքերը միացված են գետնին, իսկ փոխադրող մակերեսի բարձրությունը կարող է կարգավորվել +25 մմ-ով: Շարժիչ սարքը բաղկացած է մեջտեղում ներկառուցված դանդաղեցման շարժիչից, փոխանցման ատամնանիվների հավաքածուից, շարժիչի նստատեղից և շղթայի լարման սարքից:
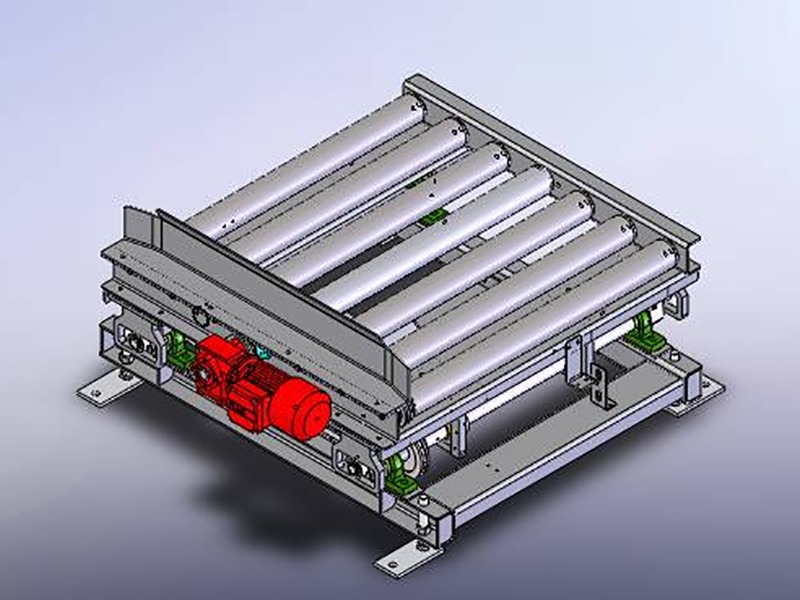
Աշխատանքային սկզբունքը՝ շարժիչը շարժում է գլանը շղթայի միջով, և գլանը մեկ այլ շղթայի միջոցով փոխանցվում է հարակից գլանին, ապա՝ մեկ այլ գլանին՝ փոխակրիչի փոխանցման գործառույթն իրականացնելու համար։
Բեռնման և տեղափոխման մեքենա
| նախագիծ | Հիմնական տվյալներ | Նշում |
| մոդել | SX-YZJ-1.0T-6 0 0H | պողպատե կառուցվածք |
| Շարժիչի ռեդուկտոր | ԿԱՐԵԼ | |
| կառուցվածքի տեսակը | ածխածնային պողպատի ծռում | |
| վերահսկողության մեթոդ | Ձեռքով/առանձին/առցանց/ավտոմատ կառավարում | |
| անվտանգության միջոցառումներ | Էլեկտրական կողպեք, պաշտպանիչ ուղեցույցներ երկու կողմերում | |
| Ստանդարտ | ՋԲ/Թ7013-93 | |
| օգտակար բեռ | Առավելագույնը 1000 կգ | |
| բեռների ստուգում | Ֆոտոէլեկտրական սենսորներ | Հիվանդ/Հիվանդ+Ֆ |
| գլան | 76 կրկնակի շղթայական գլան | |
| Առանցքակալներ և պատյաններ | Կրող՝ Հարբինի լիսեռ; Կրող նստատեղ՝ Ֆուշան FSB | |
| փոխանցման արագություն | 12 մ/րոպե | |
| Մակերեսային մշակում և ծածկույթ | Մարինացում, ֆոսֆատացում, ցողում | |
| աղմուկի կառավարում | ≤73դԲ | |
| մակերեսային ծածկույթ | համակարգչային մոխրագույն | Կցված նմուշներ |
Սարքավորումների կառուցվածքը
Սարքավորման կառուցվածքը՝ գլանաձև փոխանցման մեքենան բաղկացած է փոխադրող մասերից, բարձրացման մեխանիզմներից, ուղղորդող բաղադրիչներից և այլ միավորներից: Փոխադրող մակերեսի բարձրության կարգավորում +25 մմ: Բարձրացման մեխանիզմը կիրառում է շարժիչով շարժվող լիսեռի սկզբունքը, իսկ շարժիչ սարքը բաղկացած է մեջտեղում ներկառուցված ռեդուկտոր շարժիչից, փոխանցման ատամնանիվի հավաքածուից, շարժիչի նստատեղից և շղթայի լարման սարքից:
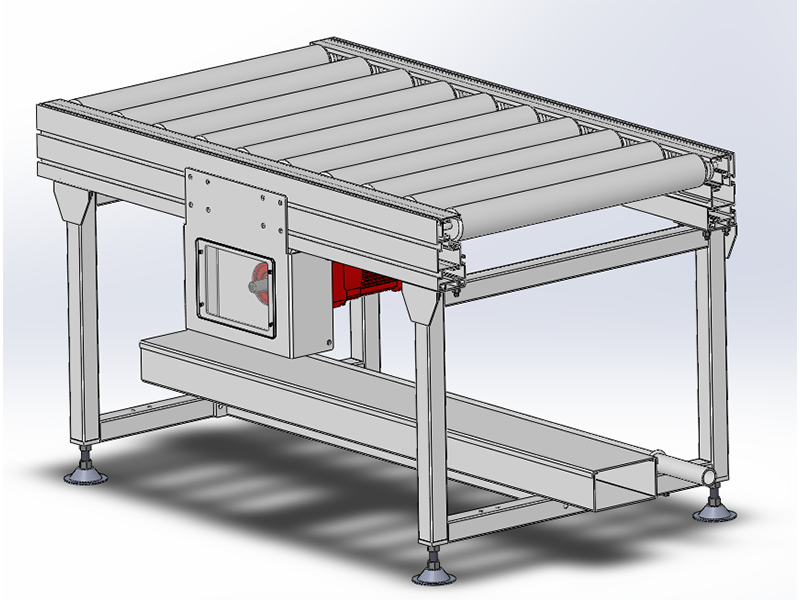
Աշխատանքային սկզբունքը. Երբ պալետը համապատասխան փոխակրիչի միջոցով տեղափոխվում է սարքավորումներին, բարձրացնող շարժիչը աշխատում է՝ գործարկելով բալետը բարձրացնելու համար նախատեսված լիսեռային մեխանիզմը, և բարձրացնող շարժիչը կանգ է առնում, երբ այն իր տեղում է։ Փոխադրող շարժիչը մեկնարկում է, պալետը տեղափոխելով կայանման սարքավորումներ, և շարժիչը կանգ է առնում, բարձրացնող շարժիչը աշխատում է, և բալետային մեխանիզմը գործարկվում է՝ սարքավորումները իջեցնելու համար, և երբ այն իր տեղում է, բարձրացնող շարժիչը կանգ է առնում աշխատանքային ցիկլն ավարտելու համար։
Անցումային փոխադրիչ
| 1) նախագիծ | Հիմնական տվյալներ | Նշում |
| մոդել | SX-GDLTJ-1.0T-500H-1.6L | |
| Շարժիչի ռեդուկտոր | ԿԱՐԵԼ | |
| կառուցվածքի տեսակը | Ոտքեր և ծռված ածխածնային պողպատ | |
| վերահսկողության մեթոդ | Ձեռքով/առանձին/առցանց/ավտոմատ կառավարում | |
| անվտանգության միջոցառումներ | Էլեկտրական կողպեք, պաշտպանիչ ուղեցույցներ երկու կողմերում | |
| Ստանդարտ | ՋԲ/Թ7013-93 | |
| օգտակար բեռ | Առավելագույնը 1000 կգ | |
| բեռների ստուգում | Ֆոտոէլեկտրական սենսորներ | Հիվանդ/Հիվանդ+Ֆ |
| շղթայական ռելս | Ցածր շփման նեյլոնե ռելս | |
| փոխադրիչ շղթա | Donghua շղթա | |
| Առանցքակալներ և պատյաններ | Առանցքակալ՝ Հարբինի լիսեռ, առանցքակալի նստատեղ՝ Ֆուկույամա FSB | |
| փոխանցման արագություն | 12 մ/րոպե | |
| Մակերեսային մշակում և ծածկույթ | Մարինացում, ֆոսֆատացում, ցողում | |
| աղմուկի կառավարում | ≤73դԲ | |
| մակերեսային ծածկույթ | համակարգչային մոխրագույն | Կցված նմուշներ |
Սարքավորումների կառուցվածքը
Սարքավորման կառուցվածքը. Այս սարքավորումը օգտագործվում է ամբարձիչի և դարակի միացման տեղում, իսկ փոխակրիչը կազմված է շրջանակից, հենարաններից և շարժիչ միավորից: Փոխակրիչի շղթան ուղիղ երկշարք շղթա է՝ P=15.875 մմ քայլով: Շղթայի հենարանը պատրաստված է բարձր մոլեկուլային պոլիէթիլենից (UHMW)՝ ինքնաշաղախիչ ազդեցությամբ: Եռակցված ոտքեր, որոնք միացված են դարակի մարմնին: Շարժիչ սարքը կազմված է մեջտեղում ներկառուցված դանդաղեցման շարժիչից, շարժիչի լիսեռի հավաքածուից, փոխանցման ատամնանիվի հավաքածուից, շարժիչի նստատեղից և շղթայի լարման սարքից, իսկ պտուտակային տիպի կարգավորիչ լարման ճախարակը լարում է փոխադրող շղթան:
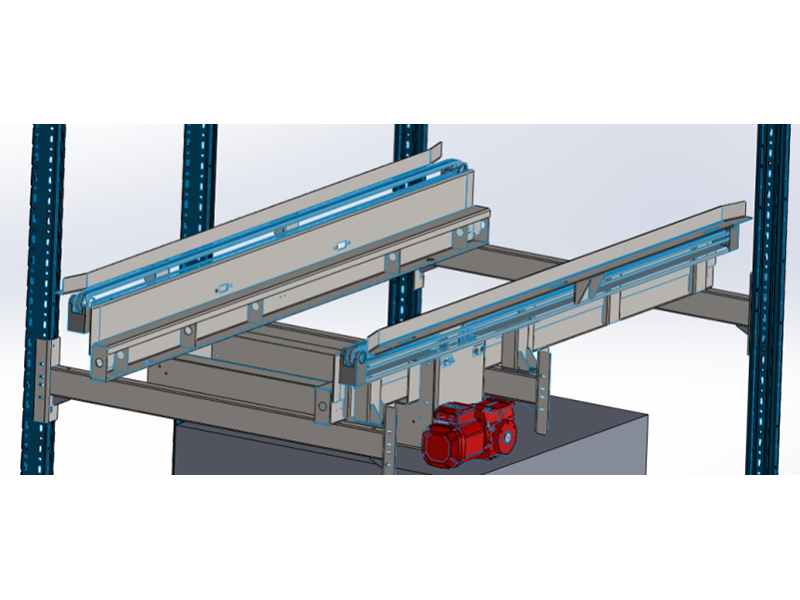
Աշխատանքային սկզբունքը՝ շարժիչը շարժում է փոխանցման լիսեռը փոխանցման խմբի միջոցով, իսկ փոխանցման լիսեռը շարժում է փոխադրման շղթան՝ պալետի փոխադրման գործառույթն իրականացնելու համար։
հատակի վերելակ
| նախագիծ | Հիմնական տվյալներ | Նշում |
| մոդել | LDTSJ-1.0T-700H | պողպատե կառուցվածք |
| Շարժիչի ռեդուկտոր | ԿԱՐԵԼ | |
| կառուցվածքի տեսակը | Սյունակ՝ ածխածնային պողպատ, ծռում։ Արտաքին կողմ՝ պողպատե թիթեղի կնիք։ | |
| վերահսկողության մեթոդ | Ձեռքով/առանձին/առցանց/ավտոմատ կառավարում | |
| անվտանգության միջոցառումներ | Էլեկտրական կողպեք, անկումը կասեցնող սարք | |
| Ստանդարտ | ՋԲ/Թ7013-93 | |
| օգտակար բեռ | Առավելագույնը 1000 կգ | |
| բեռների ստուգում | Ֆոտոէլեկտրական սենսորներ | Հիվանդ/Հիվանդ+Ֆ |
| գլան | 76 կրկնակի շղթայական գլան | |
| բարձրացնող շղթա | Donghua շղթա | |
| կրող | Ընդհանուր կրողներ՝ Հարբինի լիսեռի առանցքային կրողներ՝ NSK | |
| վազքի արագություն | Փոխադրման արագություն՝ 16 մ/րոպե, բարձրացման արագություն՝ 6 մ/րոպե | |
| Մակերեսային մշակում և ծածկույթ | Մարինացում, ֆոսֆատացում, ցողում | |
| աղմուկի կառավարում | ≤73դԲ | |
| մակերեսային ծածկույթ | համակարգչային մոխրագույն | Կցված նմուշներ |
հիմնական կառուցվածքը և առանձնահատկությունները
Շրջանակ. 5 մմ ածխածնային պողպատե ծռված թիթեղը օգտագործվում է որպես սյուն, իսկ արտաքին մասը կնքված է պողպատե թիթեղով։
Բարձրացնող մաս:
Ամբարձիչի վերևում տեղադրված է բարձրացնող շրջանակ, որը պատրաստված է ածխածնային պողպատից, իսկ բարձրացնող շարժիչը շարժման մեջ է դնում բարձրացնող ատամնանիվների հավաքածուն՝ շղթայի միջով աշխատելու համար։
Բեռնման հարթակ.
Պատրաստված է ածխածնային պողպատից։ Բեռնման հարթակը հագեցած է ստանդարտ փոխակրիչով։
աշխատանքային սկզբունքը.
Բարձրացնող շարժիչը շարժում է բեռնման հարթակը՝ բարձրացման աշխատանքներն ավարտելու համար։ Բեռնման հարթակի վրա գտնվող փոխակրիչը կարող է ապահովել ապրանքների սահուն մուտքն ու ելքը վերելակից։



