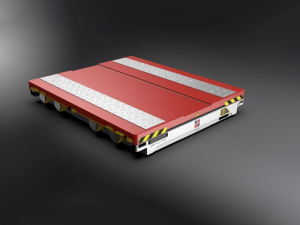
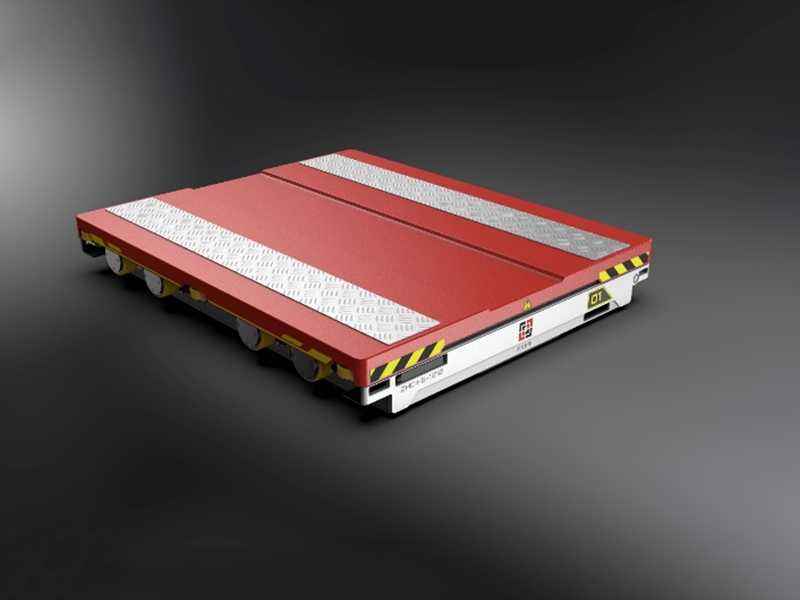
4D շաթլային համակարգեր բարձր արագության կիրառման համար
Ստանդարտ բիզնես
Անդորրագրերի հավաքագրում և պահեստից դուրս պահպանում
Տեղափոխման և գույքագրման լիցքավորման փոփոխության շերտ
Տեխնիկական պարամետրեր
| նախագիծ | Հիմնական տվյալներ | Նշում | |
| մոդել | SX-ZHC-H- 1210-2T | ||
| Կիրառելի սկուտեղ | Լայնություն՝ 1200 մմ, խորություն՝ 1000 մմ | ||
| Առավելագույն բեռ | Առավելագույնը 1500 կգ | ||
| հասակ/քաշ | Մարմնի բարձրությունը՝ 150 մմ, բեռնատարի քաշը՝ 350 կգ | ||
| Քայլելով գլխավոր X ուղղությամբ | արագություն | Առավելագույն արագությունը առանց բեռնվածության՝ 3.0 մ/վ, առավելագույնը լրիվ բեռնվածության դեպքում՝ 2.0 մ/վ | |
| քայլքի արագացում | ≤ 1.0 մ/վրկ2 | ||
| շարժիչ | Անխոզանակ սերվոշարժիչ 48VDC 1 5 00W | Ներմուծված սերվո | |
| սերվերի դրայվեր | Անխոզանակ սերվո վարորդ | Ներմուծված սերվո | |
| Քայլեք Y ուղղությամբ | արագություն | Առավելագույն առանց բեռնվածքի՝ 2.0 մ/վրկ, առավելագույն լրիվ բեռնվածության դեպքում՝ 1.0 մ/վրկ | |
| քայլքի արագացում | ≤ 0.6 մ/վրկ2 | ||
| շարժիչ | Անխոզանակ սերվոշարժիչ 48VDC 15 00W | Ներմուծված սերվո | |
| սերվերի դրայվեր | Անխոզանակ սերվո վարորդ | Ներմուծված սերվո | |
| բեռների դուրսբերում | Բեռնման բարձրությունը | 30 մմ _ | |
| շարժիչ | Անխոզանակ շարժիչ 48VDC 75 0W | Ներմուծված սերվո | |
| գլխավոր ամբարձիչ | Բեռնման բարձրությունը | 35 մմ | |
| շարժիչ | Անխոզանակ շարժիչ 48VDC 75 0W | Ներմուծված սերվո | |
| Գլխավոր ալիք/դիրքորոշման մեթոդ | Քայլելու դիրքավորում. շտրիխ կոդի դիրքավորում / լազերային դիրքավորում. | Գերմանիա P+F/SICK | |
| Երկրորդական ալիք/դիրքորոշման մեթոդ | Քայլելու դիրքավորում. ֆոտոէլեկտրական + կոդավորիչ | Գերմանիա P+F/SICK | |
| Սկուտեղի դիրքավորում՝ լազերային + ֆոտոէլեկտրական | Գերմանիա P+F/SICK | ||
| Կառավարման համակարգ | S7-1200 PLC ծրագրավորվող կառավարիչ | Գերմանիա SIEMENS | |
| հեռակառավարման վահանակ | Աշխատանքային հաճախականություն՝ 433 ՄՀց, կապի հեռավորություն՝ առնվազն 100 մետր | Ներմուծել անհատականացված | |
| Էլեկտրամատակարարում | լիթիումային մարտկոց | Ներքին բարձր որակ | |
| Մարտկոցի պարամետրեր | 48V, 30AH, օգտագործման ժամանակ ≥ 6 ժամ, լիցքավորման ժամանակ 3 ժամ, լիցքավորման ժամանակ՝ 1000 անգամ | սպասարկումից զերծ | |
| արագության կառավարման մեթոդ | Սերվոկառավարում, ցածր արագության հաստատուն պտտող մոմենտ | ||
| Խաչաձև կառավարման մեթոդ | WCS ժամանակացույց, սենսորային համակարգչի կառավարում, հեռակառավարման կառավարում | ||
| շահագործման աղմուկի մակարդակը | ≤60 դԲ | ||
| Նկարչության պահանջներ | Դարակների համադրություն (սև), վերին ծածկը կարմիր, առջևի և հետևի ալյումինե սպիտակ | ||
| շրջակա միջավայրի ջերմաստիճանը | Ջերմաստիճան՝ 0℃~50℃, խոնավություն՝ 5% ~ 95% (առանց խտացման) | ||
Խնդրում ենք մուտքագրել հաստատման կոդը