-

AMR
AMR տրոլեյբուսը՝ ավտոմատ ուղղորդման սարքերով, ինչպիսիք են էլեկտրամագնիսական կամ օպտիկականը, հագեցած տրանսպորտային միջոց է, որը կարող է ընթանալ սահմանված ուղղորդման հետագծով, ունի անվտանգության պաշտպանություն և տարբեր փոխանցման գործառույթներ: Արդյունաբերական կիրառություններում դա տրանսպորտային միջոց է, որը վարորդ չի պահանջում: Դրա սնուցման աղբյուրը լիցքավորվող մարտկոցն է:
Ջրասույզ AMR. մտեք նյութական բեռնատարի հատակը և ավտոմատ կերպով տեղադրվեք ու առանձնացեք՝ նյութերի մատակարարման և վերամշակման գործողությունները իրականացնելու համար: Տարբեր դիրքորոշման և նավիգացիոն տեխնոլոգիաների հիման վրա, մարդու կողմից վարում չպահանջող ավտոմատ փոխադրամիջոցները միասին անվանում են AMR:
-

Պալետիզատոր
Պալետիզատորը մեքենաների և համակարգչային ծրագրերի օրգանական համադրության արդյունք է, որը բարելավում է ժամանակակից արտադրության արդյունավետությունը: Պալետիզացման մեքենաները լայնորեն կիրառվում են պալետիզացման արդյունաբերության մեջ: Պալետիզացման ռոբոտները կարող են մեծապես խնայել աշխատուժի արժեքը և հատակի տարածքը:
Պալետավորող ռոբոտը ճկուն է, ճշգրիտ, արագ, արդյունավետ, կայուն և արդյունավոր։
Պալետավորող ռոբոտային համակարգը օգտագործում է կոորդինատային ռոբոտային սարք, որն ունի փոքր տարածքի և փոքր ծավալի առավելություններ։ Կարող է իրականացվել արդյունավետ, արդյունավետ և էներգախնայող լիովին ավտոմատացված բլոկային մեքենաների հավաքման գծի ստեղծման գաղափարը։
-

Սկուտեղի ծալման մեքենա
Սկուտեղների ծալման մեքենան ավտոմատ սարքավորում է, որը նաև կոչվում է կոդավորող սկուտեղների մեքենա, որն օգտագործվում է սկուտեղների փոխադրման համակարգում՝ տարբեր փոխադրիչների հետ համատեղ, դատարկ սկուտեղները փոխադրման գծին բաշխելու համար: Սկուտեղների ծալման մեքենան օգտագործվում է առանձին պալետները պալետների մեջ դասավորելու համար, ներառյալ՝ պալետների դարսման հենարանային կառուցվածք, պալետների բարձրացման սեղան, բեռի սենսոր, պալետի դիրքի հայտնաբերում, բացման/փակման ռոբոտային սենսոր, բարձրացման, իջեցման, կենտրոնական դիրքի անջատիչ:
-

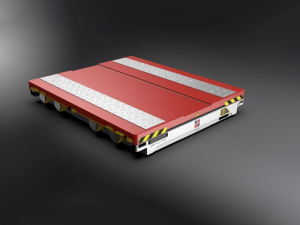
RGV
RGV-ն նշանակում է «Rel Guide Vehicle» (երկաթուղային ուղեկցող մեքենա), որը նաև կոչվում է սայլակ։ RGV-ն օգտագործվում է տարբեր բարձր խտության պահեստավորման մեթոդներով պահեստներում, և միջանցքները կարող են նախագծվել ցանկացած երկարությամբ՝ ամբողջ պահեստի պահեստային հզորությունը մեծացնելու համար։ Բացի այդ, աշխատանքի ժամանակ կարող եք նաև օգտվել այն փաստից, որ բեռնամբարձիչը կարիք չունի մտնելու գոտի, իսկ գոտիով սայլակի արագ շարժման հետ միասին այն կարող է արդյունավետորեն բարելավել պահեստի շահագործման արդյունավետությունը և այն դարձնել ավելի անվտանգ։
-

4D շաթլային համակարգերի ստանդարտ տեսակ
Որպես չորս ուղղությամբ մեքենաների ինտելեկտուալ ինտենսիվ պահեստի հիմնական սարքավորումներ, ուղղահայաց և հորիզոնական վագոնը հիմնականում բաղկացած է դարակաշարերի հավաքումից, էլեկտրական համակարգից, էլեկտրամատակարարման համակարգից, փոխանցման համակարգից, բեռնամբարձման համակարգից, սենսորային համակարգից և այլն:
-

4D շաթլային համակարգեր ցածր ջերմաստիճանի համար
Ցածր ջերմաստիճանի տարբերակի կառուցվածքը հիմնականում նույնն է, ինչ ստանդարտ տարբերակը։ Հիմնական տարբերությունը տարբեր աշխատանքային միջավայրերում է։ Ցածր ջերմաստիճանի տարբերակը հիմնականում օգտագործվում է -30 ℃ միջավայրում, ուստի դրա ներքին նյութի ընտրությունը շատ տարբեր է։ Բոլոր ներքին բաղադրիչներն ունեն ցածր ջերմաստիճանային դիմադրություն, մարտկոցը նույնպես ցածր ջերմաստիճանի բարձր արդյունավետության մարտկոց է, որը կարող է լիցքավորել -30 °C միջավայրում։ Բացի այդ, ներքին կառավարման համակարգը նույնպես կնքված է՝ պահեստից դուրս սպասարկման ժամանակ ջրի խտացումը կանխելու համար։
-

4D շաթլային համակարգեր բարձր արագության կիրառման համար
Ուղղահայաց և հորիզոնական վագոնի բարձր արագությամբ տարբերակի մեխանիզմը հիմնականում նույնն է, ինչ սովորական ուղղահայաց և հորիզոնական վագոնինը, հիմնական տարբերությունը քայլելու արագության բարելավումն է: Հաշվի առնելով համեմատաբար կանոնավոր և կայուն պալետային բեռնափոխադրումները, նախագծի ընդհանուր արդյունավետությունը բարելավելու և օգտագործվող լայնակի ձողերի քանակը նվազեցնելու համար առաջարկվում է լայնակի ձողի բարձր արագությամբ տարբերակ: Քայլելու արագության ինդեքսը կրկնակի մեծ է ստանդարտ տարբերակի համեմատ, իսկ բարձրացման արագությունը մնում է անփոփոխ: Անվտանգությունը բարելավելու համար սարքավորումների վրա տեղադրված է անվտանգության լազեր՝ բարձր արագությամբ աշխատանքից առաջացող վտանգը կանխելու համար:
-
4D շաթլային համակարգեր ծանր բեռների կիրառման համար
Ծանր բեռնատարողության լայնակի ձողի մեխանիզմը հիմնականում նույնն է, ինչ ստանդարտ տարբերակինը, հիմնական տարբերությունն այն է, որ դրա բեռնունակությունը զգալիորեն բարելավվել է: Դրա կրողունակությունը կհասնի ստանդարտ տարբերակի համեմատ գրեթե կրկնակի մեծության, և համապատասխանաբար, կնվազի նաև համապատասխան վազքի արագությունը: Կնվազեն և՛ քայլելու, և՛ բարձրանալու արագությունները:
-

Խիտ դարակաշարեր 4D շաթլերի համար
Չորս ուղղությամբ ինտենսիվ պահեստային դարակը հիմնականում կազմված է դարակաշարերի կտորներից, ենթաալիքային լայնական ճառագայթներից, ենթաալիքային ռելսերից, հորիզոնական կապող ձողերից, գլխավոր ալիքային լայնական ճառագայթներից, գլխավոր ալիքային ռելսերից, դարակների և գետնի միացումից, կարգավորվող ոտքերից, հետևի քաշող սարքերից, պաշտպանիչ ցանցերից, սպասարկման սանդուղքներից: Դարակի հիմնական նյութը Q235/Q355 է, իսկ Baosteel-ի և Wuhan Iron and Steel-ի հումքը ընտրվում և ձևավորվում է սառը գլանման միջոցով:
-

Բարձր արագությամբ բարձրացման համակարգ
Փոխադարձ պալետային վերելակը հիմնականում բաղկացած է հիմնական մասերից, ինչպիսիք են շարժիչ սարքը, բարձրացման հարթակը, հակակշիռի հավասարակշռման բլոկը, արտաքին շրջանակը և արտաքին ցանցը:
-
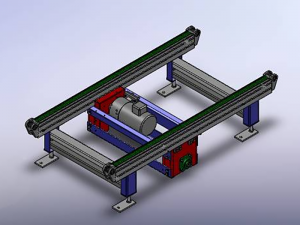
Տեղեկատվական 4D շաթլային փոխադրիչ համակարգ
Շարժիչը շարժիչի լիսեռը շարժում է փոխանցման խմբի միջոցով, իսկ շարժիչի լիսեռը շարժում է փոխադրող շղթան՝ պալետի փոխադրման գործառույթն իրականացնելու համար։
-

WCS-Պահեստի կառավարման համակարգ
WCS համակարգը պատասխանատու է համակարգի և սարքավորումների միջև ժամանակացույցի կազմման համար և WMS համակարգի կողմից տրված հրամանները ուղարկում է յուրաքանչյուր սարքավորմանը՝ համակարգված աշխատանքի համար: Սարքավորման և WCS համակարգի միջև կա անընդհատ կապ: Երբ սարքավորումն ավարտում է առաջադրանքը, WCS համակարգը ավտոմատ կերպով կատարում է տվյալների մուտքագրում WMS համակարգի հետ: